Lemur | Robot climber |
 The firm research language says: The goal of this project
The firm research language says: The goal of this project is to enable a multi-limbed robot to climb vertical rock, using skills and techniques similar to those developed by human climbers. In particular, I want the robot to free-climb (i.e., use only natural features and friction of the terrain for upward progress) rather than aid-climb (i.e., rely on additional gear for progress).

Lemur – robot-climber
The reality is much more interesting namely if readers are climbers.
What amazing machine is doing the same movements as we do to reach a hold/top.
This vertical domain was designated for some species like lizards and monkeys so far. But now first small step for slow robot has been done and maybe one giant leap for mankind. At least it could be a big leap for climbers.
The robot has the name Lemur was created by Timothy Wolfe Bretl.
Lemur climbs just vertical faces so far but Timothy claims that overhanging parts are not beyond the possibility of the robot.
Is not a fundamental limitation of the hardware. It is actually a control problem. In order to climb overhangs, the robot needs to be able to control the forces it applies to holds, as while as its posture. We haven't implemented that capability yet. (My software can already plan motions across overhanging rock.) Concerning holds: basically, the robot can use any hold a human would be able to, with one finger.

Timothy with his front-runner Lemur
Here you can download a video of Lemur IIb Download the video (6,5 Mb). Video is in mpeg format.
Download the video (6,5 Mb). Video is in mpeg format.

Timothy performing a classic back-step move at Castle Rock State Park, CA.
Study of force influence
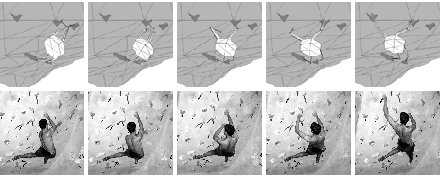
Comparison of a human climber and a robot
Here you can see more detailed information concerning Lemur at Timothy's web page Timothy Wolfe Bretl
The reality is much more interesting namely if readers are climbers.
What amazing machine is doing the same movements as we do to reach a hold/top.
This vertical domain was designated for some species like lizards and monkeys so far. But now first small step for slow robot has been done and maybe one giant leap for mankind. At least it could be a big leap for climbers.
The robot has the name Lemur was created by Timothy Wolfe Bretl.
Lemur climbs just vertical faces so far but Timothy claims that overhanging parts are not beyond the possibility of the robot.
Is not a fundamental limitation of the hardware. It is actually a control problem. In order to climb overhangs, the robot needs to be able to control the forces it applies to holds, as while as its posture. We haven't implemented that capability yet. (My software can already plan motions across overhanging rock.) Concerning holds: basically, the robot can use any hold a human would be able to, with one finger.
Here you can download a video of Lemur IIb
Download the video (6,5 Mb). Video is in mpeg format.Here you can see more detailed information concerning Lemur at Timothy's web page Timothy Wolfe Bretl
| JirkaS [edit] | 22:37 19.11.2004 |
Commentaries | New comment  |